Control various driver and road properties including the tendency to change lanes, the degree to which vehicles want to maintain a safe distance/keep within speed limit, the driver’s threshold braking and road’s friction etc.
Lane changing algorithm using probabilistic models considering the intention of driver (to turn in the next junction or to drive faster) and the surrounding vehicles.
Speed changing algorithm considering the speed/distance of vehicle ahead, the speed limit, whether the vehicle in front is a truck, any vehicles that try to change lane in front.
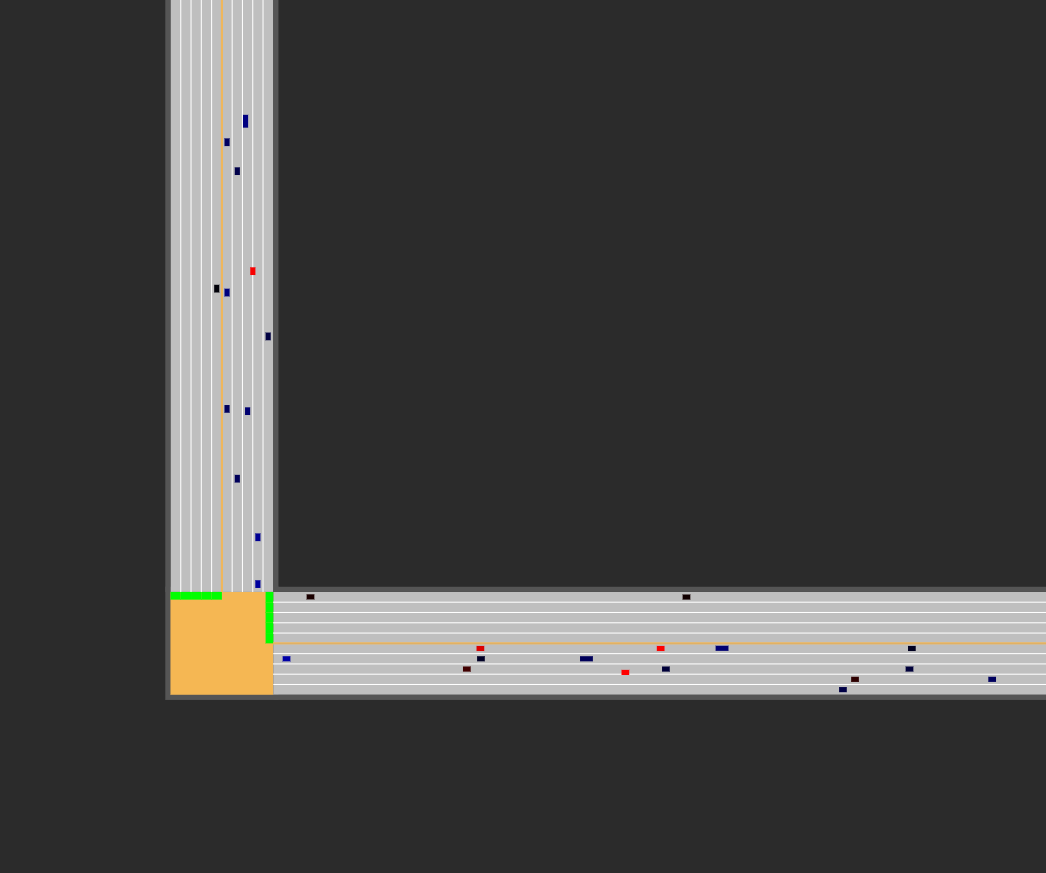
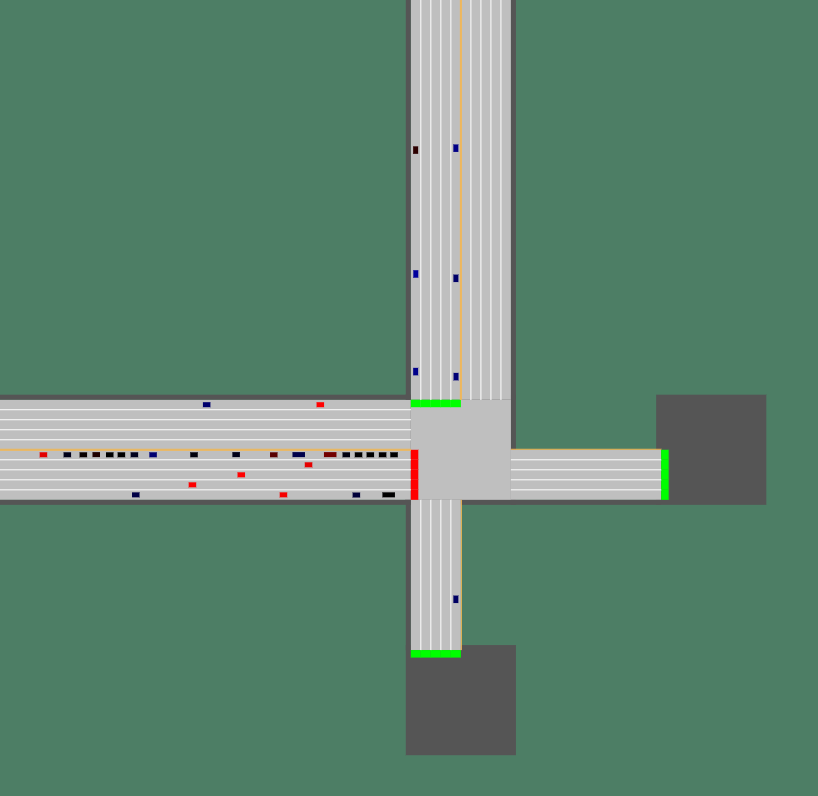
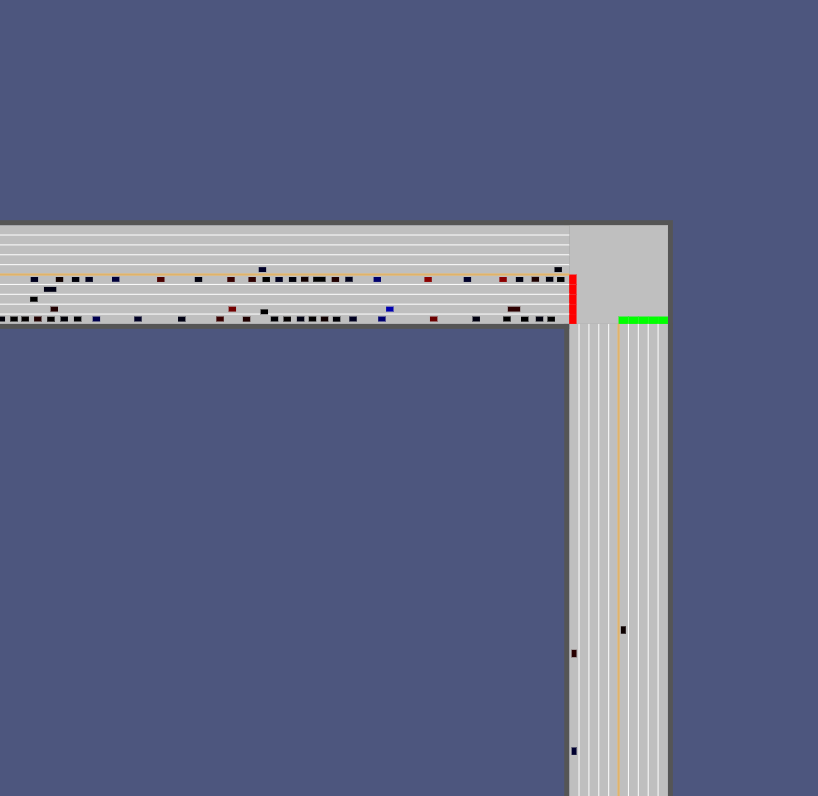
Interactive visualization to pan/zoom around roads and change simulation properties. Create experiments to simulate vehicle congestion.